
The USGS presently operates 102 streamgaging stations distributed throughout Alaska. As many of these stations are quite remote, considerable effort is needed to collect periodic measurements and maintain gages. Thus, developing remote sensing methods for measuring streamflow in this vast, largely inaccessible State is valuable for many reasons. Such a capacity could potentially augment and economize the current USGS hydrologic network in Alaska, reduce or eliminate risk to personnel during extreme events, and provide a better understanding of water fluxes in ungaged watersheds.
The USGS Geomorphology and Sediment Transport Laboratory, in collaboration with the U.S. Army Corps of Engineers Cold Regions Research and Engineering Laboratory (CRREL), used a helicopter to acquire remotely sensed data from the Knik, Matanuska, Chena, and Salcha Rivers from August 8–9, 2017. A lidar sensor was installed inside a HeliPod designed and operated by CRREL. Lidar returns were used to produce digital elevation models (DEM) and intensity images. In addition to housing the lidar system, the HeliPod was modified to accommodate a thermal infrared camera and a hyperspectral sensor. A lidar digital elevation model (DEM) of the water surface was used to measure the slope of the river, while lidar return intensities were used to map the extent of the wetted river channel. Infrared images of the water surface captured the advection of thermal structures caused by turbulent mixing and allowed researchers to calculate surface flow velocities from thermal image time series using motion tracking algorithms. The hyperspectral sensor measured reflectance in many narrow wavelength bands spanning the visible and near-infrared portions of the spectrum; these data are used to identify and classify objects based on their spectral signatures. Hyperspectral images of rivers record solar energy that has interacted with the water surface, water column, and streambed, and in certain conditions can be exploited to estimate water depth and map river bottom characteristics.
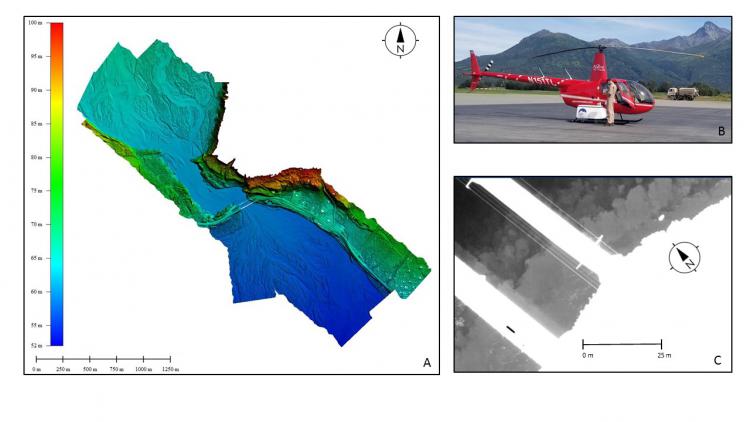
A) Lidar DEM of the Matanuska River, B) Robinson R44 with CRREL HeliPod, and C) Infrared image of thermal structures near a bridge.